|
MRKISS 2025-09-10
A tiny library with zero dependencies that aims to make it easy to use & experiment with explicit Runge-Kutta methods.
|
|
MRKISS 2025-09-10
A tiny library with zero dependencies that aims to make it easy to use & experiment with explicit Runge-Kutta methods.
|
Solvers. More...
Data Types | |
| interface | deq_iface |
| Type for ODE dydt functions. More... | |
| interface | sdf_iface |
| Type SDF function on a solution point. More... | |
| interface | stepp_iface |
| Type step processing subroutine. More... | |
Functions/Subroutines | |
One Step Solvers | |
| subroutine, public | step_all (status, y_deltas, dy, deq, t, y, param, a, b, c, t_delta) |
| Compute one step of a embedded Runge-Kutta method expressed as a Butcher Tableau. | |
| subroutine, public | step_one (status, y_delta, dy, deq, t, y, param, a, b, c, t_delta) |
| Compute one step of a Runge-Kutta method expressed as a Butcher Tableau. | |
| subroutine, public | step_richardson (status, y_delta, dy, deq, t, y, param, a, b, c, p, t_delta) |
| Compute one Richardson Extrapolation Step. | |
One Step Test Solvers | |
| subroutine, public | step_rk4 (status, y_delta, dy, deq, t, y, param, t_delta) |
| Compute one step of RK4 – the classical 4th order Runge-Kutta method (mrkiss_erk_kutta_4). | |
| subroutine, public | step_rkf45 (status, y_deltas, dy, deq, t, y, param, t_delta) |
| Compute one step of RKF45 (mrkiss_eerk_fehlberg_4_5). | |
| subroutine, public | step_dp54 (status, y_deltas, dy, deq, t, y, param, t_delta) |
| Compute one step of DP45 (mrkiss_eerk_dormand_prince_5_4) | |
Multistep Solvers | |
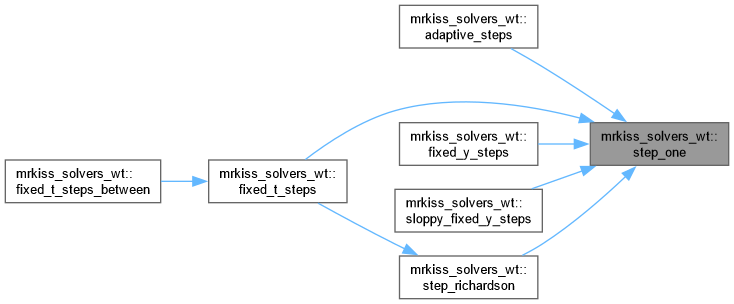
| subroutine, public | fixed_t_steps (status, istats, solution, deq, t, y, param, a, b, c, p_o, max_pts_o, t_delta_o, t_end_o, t_max_o) |
| Take multiple fixed time steps with a simple Runge-Kutta method. | |
| subroutine, public | fixed_y_steps (status, istats, solution, deq, t, y, param, a, b, c, y_delta_len_targ, t_delta_max, t_delta_min_o, y_delta_len_tol_o, max_bisect_o, no_bisect_error_o, y_delta_len_idxs_o, max_pts_o, y_sol_len_max_o, t_max_o) |
| Take multiple adaptive steps with constant \(\mathbf{\Delta{y}}\) length using a simple Runge-Kutta method. | |
| subroutine, public | sloppy_fixed_y_steps (status, istats, solution, deq, t, y, param, a, b, c, y_delta_len_targ, t_delta_ini, t_max_o, t_delta_min_o, t_delta_max_o, y_delta_len_idxs_o, adj_short_o, max_pts_o, y_sol_len_max_o) |
| Take multiple adaptive steps adjusting for the length of \(\mathbf{\Delta{y}}\) using a simple Runge-Kutta method. | |
| subroutine, public | adaptive_steps (status, istats, solution, deq, t, y, param, a, b, c, p, t_max_o, t_end_o, t_delta_ini_o, t_delta_min_o, t_delta_max_o, t_delta_fac_min_o, t_delta_fac_max_o, t_delta_fac_fdg_o, error_tol_abs_o, error_tol_rel_o, max_pts_o, max_bisect_o, no_bisect_error_o, sdf_o, sdf_tol_o, stepp_o) |
| Take multiple adaptive steps with an embedded Runge-Kutta method using relatively traditional step size controls. | |
Multistep Meta Solvers | |
| subroutine, public | fixed_t_steps_between (status, istats, solution, deq, y, param, a, b, c, steps_per_pnt, p_o) |
Take a solution with \(t\) values pre-populated, and take steps_per_pnt Runge-Kutta steps between each \(t\) value. | |
| subroutine, public | interpolate_solution (status, istats, solution, src_solution, deq, param, num_src_pts_o, linear_interp_o) |
| Create an interpolated solution from a source solution. | |
Solvers.
| subroutine, public mrkiss_solvers_wt::step_all | ( | integer, intent(out) | status, |
| real(kind=rk), dimension(:,:), intent(out) | y_deltas, | ||
| real(kind=rk), dimension(:), intent(out) | dy, | ||
| procedure(deq_iface) | deq, | ||
| real(kind=rk), intent(in) | t, | ||
| real(kind=rk), dimension(:), intent(in) | y, | ||
| real(kind=rk), dimension(:), intent(in) | param, | ||
| real(kind=rk), dimension(:,:), intent(in) | a, | ||
| real(kind=rk), dimension(:,:), intent(in) | b, | ||
| real(kind=rk), dimension(:), intent(in) | c, | ||
| real(kind=rk), intent(in) | t_delta ) |
Compute one step of a embedded Runge-Kutta method expressed as a Butcher Tableau.
| status | Exit status
| ||||||||
| y_deltas | Returned \(\mathbf{\Delta{y}}\) values(s) for the method | ||||||||
| dy | Returned \(\mathbf{y}'\) value at \(t\) | ||||||||
| deq | The equation subroutine returning values for \(\mathbf{y}'\) – i.e. \(\mathbf{f}(t, \mathbf{y})\) | ||||||||
| t | Initial condition for \(t\) – i.e. \(t_0\). | ||||||||
| y | Initial condition for \(\mathbf{y}\) – i.e. \(\mathbf{y_0}\). | ||||||||
| param | Data payload passed to deq | ||||||||
| a | The butcher tableau \(\mathbf{a}\) matrix | ||||||||
| b | The butcher tableau \(\mathbf{b}\) vector | ||||||||
| c | The butcher tableau \(\mathbf{c}\) vector | ||||||||
| t_delta | The \(\Delta{t}\) value for this step. |
Definition at line 152 of file mrkiss_solvers_wt.f90.

| subroutine, public mrkiss_solvers_wt::step_one | ( | integer, intent(out) | status, |
| real(kind=rk), dimension(:), intent(out) | y_delta, | ||
| real(kind=rk), dimension(:), intent(out) | dy, | ||
| procedure(deq_iface) | deq, | ||
| real(kind=rk), intent(in) | t, | ||
| real(kind=rk), dimension(:), intent(in) | y, | ||
| real(kind=rk), dimension(:), intent(in) | param, | ||
| real(kind=rk), dimension(:,:), intent(in) | a, | ||
| real(kind=rk), dimension(:,:), intent(in) | b, | ||
| real(kind=rk), dimension(:), intent(in) | c, | ||
| real(kind=rk), intent(in) | t_delta ) |
Compute one step of a Runge-Kutta method expressed as a Butcher Tableau.
| status | Exit status
| ||||||||
| y_delta | Returned \(\mathbf{\Delta{y}}\) value for the method | ||||||||
| dy | Returned \(\mathbf{y}'\) value at \(t\) | ||||||||
| deq | The equation subroutine returning values for \(\mathbf{y}'\) – i.e. \(\mathbf{f}(t, \mathbf{y})\) | ||||||||
| t | Initial condition for \(t\) – i.e. \(t_0\). | ||||||||
| y | Initial condition for \(\mathbf{y}\) – i.e. \(\mathbf{y_0}\). | ||||||||
| param | Data payload passed to deq | ||||||||
| a | The butcher tableau \(\mathbf{a}\) matrix | ||||||||
| b | The butcher tableau \(\mathbf{b}\) vector | ||||||||
| c | The butcher tableau \(\mathbf{c}\) vector | ||||||||
| t_delta | The \(\Delta{t}\) value for this step. |
Definition at line 207 of file mrkiss_solvers_wt.f90.
| subroutine, public mrkiss_solvers_wt::step_richardson | ( | integer, intent(out) | status, |
| real(kind=rk), dimension(:), intent(out) | y_delta, | ||
| real(kind=rk), dimension(:), intent(out) | dy, | ||
| procedure(deq_iface) | deq, | ||
| real(kind=rk), intent(in) | t, | ||
| real(kind=rk), dimension(:), intent(in) | y, | ||
| real(kind=rk), dimension(:), intent(in) | param, | ||
| real(kind=rk), dimension(:,:), intent(in) | a, | ||
| real(kind=rk), dimension(:,:), intent(in) | b, | ||
| real(kind=rk), dimension(:), intent(in) | c, | ||
| integer, dimension(:), intent(in) | p, | ||
| real(kind=rk), intent(in) | t_delta ) |
Compute one Richardson Extrapolation Step.
This routine produces an improved value for \(\mathbf{\Delta{y}}\), whch we denote by \(\mathbf{\Delta{\tilde{y}}}\), by combining two approximations of \(\mathbf{\Delta{y}}\). If the original Runge-Kutta method was \(\mathcal{O}(p)\), then this new approximation is \(\mathcal{O}(p+1)\). The first approximation of \(\mathbf{\Delta{y}}\), which we denote by \(\mathbf{\Delta{y_B}}\), is computed in the standard way with a single Runge-Kutta step of size \(\Delta{t}\). The second approximation of \(\mathbf{\Delta{y}}\), which we denote by \(\mathbf{\Delta{y_S}}\), is computed by taking two Runge-Kutta steps of size \(\frac{\Delta{t}}{2}\). We combine these approximations to compute our improved \(\mathbf{\Delta{y}}\) as follows:
\[ \mathbf{\Delta{\tilde{y}}} = \mathbf{\Delta{y_S}} + \frac{\mathbf{\Delta{y_S}} - \mathbf{\Delta{y_B}}}{2^p - 1} \]
| status | Exit status
| ||||||||||
| y_delta | Returned \(\mathbf{\Delta{y}}\) for the method | ||||||||||
| dy | Returned \(\mathbf{y}'\) value at \(t\) | ||||||||||
| deq | The equation subroutine returning values for \(\mathbf{y}'\) – i.e. \(\mathbf{f}(t, \mathbf{y})\) | ||||||||||
| t | Initial condition for \(t\) – i.e. \(t_0\). | ||||||||||
| y | Initial condition for \(\mathbf{y}\) – i.e. \(\mathbf{y_0}\). | ||||||||||
| param | Data payload passed to deq | ||||||||||
| a | The butcher tableau \(\mathbf{a}\) matrix | ||||||||||
| b | The butcher tableau \(\mathbf{{b}}\) vector | ||||||||||
| c | The butcher tableau \(\mathbf{c}\) vector | ||||||||||
| p | The order(s) of the Runge-Kutta methods in the butcher tableau | ||||||||||
| t_delta | The \(\Delta{t}\) value for this step. |
Definition at line 274 of file mrkiss_solvers_wt.f90.


| subroutine, public mrkiss_solvers_wt::step_rk4 | ( | integer, intent(out) | status, |
| real(kind=rk), dimension(:), intent(out) | y_delta, | ||
| real(kind=rk), dimension(:), intent(out) | dy, | ||
| procedure(deq_iface) | deq, | ||
| real(kind=rk), intent(in) | t, | ||
| real(kind=rk), dimension(:), intent(in) | y, | ||
| real(kind=rk), dimension(:), intent(in) | param, | ||
| real(kind=rk), intent(in) | t_delta ) |
Compute one step of RK4 – the classical 4th order Runge-Kutta method (mrkiss_erk_kutta_4).
| status | Exit status
| ||||||||
| y_delta | Returned \(\mathbf{\Delta{y}}\) for the method | ||||||||
| dy | Returned \(\mathbf{y}'\) value at \(t\) | ||||||||
| deq | The equation subroutine returning values for \(\mathbf{y}'\) – i.e. \(\mathbf{f}(t, \mathbf{y})\) | ||||||||
| t | Initial condition for \(t\) – i.e. \(t_0\). | ||||||||
| y | Initial condition for \(\mathbf{y}\) – i.e. \(\mathbf{y_0}\). | ||||||||
| param | Data payload passed to deq | ||||||||
| t_delta | The \(\Delta{t}\) value for this step. |
Definition at line 325 of file mrkiss_solvers_wt.f90.
| subroutine, public mrkiss_solvers_wt::step_rkf45 | ( | integer, intent(out) | status, |
| real(kind=rk), dimension(:,:), intent(out) | y_deltas, | ||
| real(kind=rk), dimension(:), intent(out) | dy, | ||
| procedure(deq_iface) | deq, | ||
| real(kind=rk), intent(in) | t, | ||
| real(kind=rk), dimension(:), intent(in) | y, | ||
| real(kind=rk), dimension(:), intent(in) | param, | ||
| real(kind=rk), intent(in) | t_delta ) |
Compute one step of RKF45 (mrkiss_eerk_fehlberg_4_5).
| status | Exit status
| ||||||||
| y_deltas | Returned \(\mathbf{\Delta{y}}\) values | ||||||||
| dy | Returned \(\mathbf{y}'\) value at \(t\) | ||||||||
| deq | The equation subroutine returning values for \(\mathbf{y}'\) – i.e. \(\mathbf{f}(t, \mathbf{y})\) | ||||||||
| t | Initial condition for \(t\) – i.e. \(t_0\). | ||||||||
| y | Initial condition for \(\mathbf{y}\) – i.e. \(\mathbf{y_0}\). | ||||||||
| param | Data payload passed to deq | ||||||||
| t_delta | The \(\Delta{t}\) value for this step. |
Definition at line 366 of file mrkiss_solvers_wt.f90.
| subroutine, public mrkiss_solvers_wt::step_dp54 | ( | integer, intent(out) | status, |
| real(kind=rk), dimension(:,:), intent(out) | y_deltas, | ||
| real(kind=rk), dimension(:), intent(out) | dy, | ||
| procedure(deq_iface) | deq, | ||
| real(kind=rk), intent(in) | t, | ||
| real(kind=rk), dimension(:), intent(in) | y, | ||
| real(kind=rk), dimension(:), intent(in) | param, | ||
| real(kind=rk), intent(in) | t_delta ) |
Compute one step of DP45 (mrkiss_eerk_dormand_prince_5_4)
| status | Exit status
| ||||||||
| y_deltas | Returned \(\mathbf{\Delta{y}}\) values | ||||||||
| dy | Returned \(\mathbf{y}'\) value at \(t\) | ||||||||
| deq | The equation subroutine returning values for \(\mathbf{y}'\) – i.e. \(\mathbf{f}(t, \mathbf{y})\) | ||||||||
| t | Initial condition for \(t\) – i.e. \(t_0\). | ||||||||
| y | Initial condition for \(\mathbf{y}\) – i.e. \(\mathbf{y_0}\). | ||||||||
| param | Data payload passed to deq | ||||||||
| t_delta | The \(\Delta{t}\) value for this step. |
Definition at line 414 of file mrkiss_solvers_wt.f90.
| subroutine, public mrkiss_solvers_wt::fixed_t_steps | ( | integer, intent(out) | status, |
| integer, dimension(istats_size), intent(out) | istats, | ||
| real(kind=rk), dimension(:,:), intent(out) | solution, | ||
| procedure(deq_iface) | deq, | ||
| real(kind=rk), intent(in) | t, | ||
| real(kind=rk), dimension(:), intent(in) | y, | ||
| real(kind=rk), dimension(:), intent(in) | param, | ||
| real(kind=rk), dimension(:,:), intent(in) | a, | ||
| real(kind=rk), dimension(:,:), intent(in) | b, | ||
| real(kind=rk), dimension(:), intent(in) | c, | ||
| integer, dimension(:), intent(in), optional | p_o, | ||
| integer, intent(in), optional | max_pts_o, | ||
| real(kind=rk), intent(in), optional | t_delta_o, | ||
| real(kind=rk), intent(in), optional | t_end_o, | ||
| real(kind=rk), intent(in), optional | t_max_o ) |
Take multiple fixed time steps with a simple Runge-Kutta method.
| status | Exit status
| ||||||||||||
| istats | Integer statistics for run
| ||||||||||||
| solution | Array for solution. Each COLUMN is a solution:
| ||||||||||||
| deq | The equation subroutine returning values for \(\mathbf{y}'\) – i.e. \(\mathbf{f}(t, \mathbf{y})\) | ||||||||||||
| t | Initial condition for \(t\) – i.e. \(t_0\). | ||||||||||||
| y | Initial condition for \(\mathbf{y}\) – i.e. \(\mathbf{y_0}\). | ||||||||||||
| param | Data payload passed to deq | ||||||||||||
| a | The butcher tableau \(\mathbf{a}\) matrix | ||||||||||||
| b | The butcher tableau \(\mathbf{{b}}\) vector | ||||||||||||
| c | The butcher tableau \(\mathbf{c}\) vector | ||||||||||||
| p_o | The order for the Runge-Kutta method in the butcher tableau to enable Richardson extrapolation | ||||||||||||
| max_pts_o | Maximum number of points to put in solution. If max_pts_o>1 & size(solution, 2)==1, then max_pts_o-1 steps are taken and only the last solution is stored in solution. | ||||||||||||
| t_delta_o | Step size to use.
| ||||||||||||
| t_end_o | End point for last step. Silently ignored if t_delta_o is provided. | ||||||||||||
| t_max_o | Maximum value for \(t\) |
Definition at line 488 of file mrkiss_solvers_wt.f90.


| subroutine, public mrkiss_solvers_wt::fixed_y_steps | ( | integer, intent(out) | status, |
| integer, dimension(istats_size), intent(out) | istats, | ||
| real(kind=rk), dimension(:,:), intent(out) | solution, | ||
| procedure(deq_iface) | deq, | ||
| real(kind=rk), intent(in) | t, | ||
| real(kind=rk), dimension(:), intent(in) | y, | ||
| real(kind=rk), dimension(:), intent(in) | param, | ||
| real(kind=rk), dimension(:,:), intent(in) | a, | ||
| real(kind=rk), dimension(:,:), intent(in) | b, | ||
| real(kind=rk), dimension(:), intent(in) | c, | ||
| real(kind=rk), intent(in) | y_delta_len_targ, | ||
| real(kind=rk), intent(in) | t_delta_max, | ||
| real(kind=rk), intent(in), optional | t_delta_min_o, | ||
| real(kind=rk), intent(in), optional | y_delta_len_tol_o, | ||
| integer, intent(in), optional | max_bisect_o, | ||
| logical, intent(in), optional | no_bisect_error_o, | ||
| integer, dimension(:), intent(in), optional | y_delta_len_idxs_o, | ||
| integer, intent(in), optional | max_pts_o, | ||
| real(kind=rk), intent(in), optional | y_sol_len_max_o, | ||
| real(kind=rk), intent(in), optional | t_max_o ) |
Take multiple adaptive steps with constant \(\mathbf{\Delta{y}}\) length using a simple Runge-Kutta method.
This method attempts to precisely control the length of \(\mathbf{\Delta{y}}\) which we denote by \(\vert\vert\mathbf{\Delta{y}}\vert\vert_L\). This is done by finding a value for \(\Delta{t}\) for which \(\vert\vert\mathbf{\Delta{y}}\vert\vert_L\) is equal to y_delta_len_targ with an accuracy of y_delta_len_tol_o.
This value for \(\Delta{t}\) is found via bisection. For each solution point we first compute two Runge-Kutta steps with \(\Delta{t}\) set to t_delta_min_o and t_delta_max. We hope that the lengths of the two \(\mathbf{\Delta{y}}\) values thus obtained will bracket y_delta_len_targ. If they don't then we can't isolate an appropriate value for \(\Delta{t}\). In this case we ignore the issue and continue to the next step if no_bisect_error_o is .TRUE., otherwise we error out with a status code of 1024. If the lengths of our \(\mathbf{\Delta{y}}\) values bracket the target, then we use bisection to localize a value for \(\Delta{t}\).
The length, which we have denoted by \(\vert\vert\mathbf{\Delta{y}}\vert\vert_L\), is defined to be the Euclidean distance of the vector defined by the elements of \(\mathbf{\Delta{y}}\) that are indexed by y_delta_len_idxs_o.
Note there is no mathematical guarantee that a Runge-Kutta step of size t_delta_min_o and t_delta_max will produce solutions that bracket y_delta_len_targ. That said, for well behaved functions a t_delta_min_o and t_delta_max may always be found that work. Usually finding good values are t_delta_min_o and t_delta_max isn't difficult. For challenging cases, a good approach is to use fixed_t_steps() over the interval in question, and then examine the values of \(\vert\vert\mathbf{\Delta{y}}\vert\vert_L\) in the solution via analyze_solution().
My primary use case for this function is to create uniform sphere sweeps for constructive solid geometry applications.
| status | Exit status
| ||||||||||||||
| istats | Integer statistics for run
| ||||||||||||||
| solution | Array for solution. Each COLUMN is a solution:
| ||||||||||||||
| deq | The equation subroutine returning values for \(\mathbf{y}'\) – i.e. \(\mathbf{f}(t, \mathbf{y})\) | ||||||||||||||
| t | Initial condition for \(t\) – i.e. \(t_0\). | ||||||||||||||
| y | Initial condition for \(\mathbf{y}\) – i.e. \(\mathbf{y_0}\). | ||||||||||||||
| param | Data payload passed to deq | ||||||||||||||
| a | The butcher tableau \(\mathbf{a}\) matrix | ||||||||||||||
| b | The butcher tableau \(\mathbf{{b}}\) vector | ||||||||||||||
| c | The butcher tableau \(\mathbf{c}\) vector | ||||||||||||||
| y_delta_len_targ | Target length for \(\mathbf{\Delta{y}}\) – i.e. \(\vert\vert\mathbf{\Delta{y}}\vert\vert_L\) | ||||||||||||||
| t_delta_max | Maximum \(\Delta{t}\) | ||||||||||||||
| t_delta_min_o | Minimum \(\Delta{t}\) | ||||||||||||||
| y_delta_len_tol_o | How close we have to get to y_delta_len_targ. Default is y_delta_len_targ/100 | ||||||||||||||
| y_delta_len_idxs_o | Components of \(\mathbf{\Delta{y}}\) to use for length computation | ||||||||||||||
| max_pts_o | Maximum number of points to put in solution. | ||||||||||||||
| max_bisect_o | Maximum number of bisection iterations per each step. Default: mrkiss_config::max_bisect_ai | ||||||||||||||
| no_bisect_error_o | If .TRUE., then do not exit on bisection errors | ||||||||||||||
| y_sol_len_max_o | Maximum length of the solution curve | ||||||||||||||
| t_max_o | Maximum value for \(t\) |
Definition at line 631 of file mrkiss_solvers_wt.f90.

| subroutine, public mrkiss_solvers_wt::sloppy_fixed_y_steps | ( | integer, intent(out) | status, |
| integer, dimension(istats_size), intent(out) | istats, | ||
| real(kind=rk), dimension(:,:), intent(out) | solution, | ||
| procedure(deq_iface) | deq, | ||
| real(kind=rk), intent(in) | t, | ||
| real(kind=rk), dimension(:), intent(in) | y, | ||
| real(kind=rk), dimension(:), intent(in) | param, | ||
| real(kind=rk), dimension(:,:), intent(in) | a, | ||
| real(kind=rk), dimension(:,:), intent(in) | b, | ||
| real(kind=rk), dimension(:), intent(in) | c, | ||
| real(kind=rk), intent(in) | y_delta_len_targ, | ||
| real(kind=rk), intent(in) | t_delta_ini, | ||
| real(kind=rk), intent(in), optional | t_max_o, | ||
| real(kind=rk), intent(in), optional | t_delta_min_o, | ||
| real(kind=rk), intent(in), optional | t_delta_max_o, | ||
| integer, dimension(:), intent(in), optional | y_delta_len_idxs_o, | ||
| integer, intent(in), optional | adj_short_o, | ||
| integer, intent(in), optional | max_pts_o, | ||
| real(kind=rk), intent(in), optional | y_sol_len_max_o ) |
Take multiple adaptive steps adjusting for the length of \(\mathbf{\Delta{y}}\) using a simple Runge-Kutta method.
This method attempts to control the length of \(\mathbf{\Delta{y}}\) which we denote by \(\vert\vert\mathbf{\Delta{y}}\vert\vert_L\). At each solution step it takes a probing step with \(\Delta{t}\) equal to t_delta_ini and then takes another step with \(\Delta{t}\) equal to: t_delta_ini * y_delta_len_targ / y_delta_len
If which will result in a \(\vert\vert\mathbf{\Delta{y}}\vert\vert_L\) approximately y_delta_len_targ when \(\Delta{t}\) is proportional to \(\vert\vert\mathbf{\Delta{y}}\vert\vert_L\). By default this second step is only taken when \(\vert\vert\mathbf{\Delta{y}}\vert\vert_L\) of the probe step is greater than y_delta_len_targ; however, it will be performed on shorter steps when adj_short_o is present – in this mode it approximates the behavior fixed_y_steps() but is much faster.
Note the assumption that \(\Delta{t}\) is proportional to \(\vert\vert\mathbf{\Delta{y}}\vert\vert_L\). We have no mathematical guarantee for this assumption; however, it is a fair approximation with well behaved functions when t_delta_ini is small enough.
The length, which we have denoted by \(\vert\vert\mathbf{\Delta{y}}\vert\vert_L\), is defined to be the Euclidean distance of the vector defined by the elements of \(\mathbf{\Delta{y}}\) that are indexed by y_delta_len_idxs_o.
My primary use case for this function is to shrink down long steps for smoother curves/tubes in visualizations.
| status | Exit status
| ||||||||||
| istats | Integer statistics for run
| ||||||||||
| solution | Array for solution. Each COLUMN is a solution:
| ||||||||||
| deq | The equation subroutine returning values for \(\mathbf{y}'\) – i.e. \(\mathbf{f}(t, \mathbf{y})\) | ||||||||||
| t | Initial condition for \(t\) – i.e. \(t_0\). | ||||||||||
| y | Initial condition for \(\mathbf{y}\) – i.e. \(\mathbf{y_0}\). | ||||||||||
| param | Data payload passed to deq | ||||||||||
| a | The butcher tableau \(\mathbf{a}\) matrix | ||||||||||
| b | The butcher tableau \(\mathbf{{b}}\) vector | ||||||||||
| c | The butcher tableau \(\mathbf{c}\) vector | ||||||||||
| y_delta_len_targ | Target length for \(\mathbf{\Delta{y}}\) – i.e. \(\vert\vert\mathbf{\Delta{y}}\vert\vert_L\) | ||||||||||
| t_delta_ini | Test step \(\Delta{t}\) | ||||||||||
| t_delta_max_o | Maximum \(\Delta{t}\) | ||||||||||
| t_delta_min_o | Minimum \(\Delta{t}\) | ||||||||||
| y_delta_len_idxs_o | Components of \(\mathbf{\Delta{y}}\) to use for length computation | ||||||||||
| adj_short_o | Adjust when \(\Delta{t}\) is too short as well as when it's too long. | ||||||||||
| max_pts_o | Maximum number of points to put in solution. | ||||||||||
| y_sol_len_max_o | Maximum length of the solution curve | ||||||||||
| t_max_o | Maximum value for \(t\) |
Definition at line 835 of file mrkiss_solvers_wt.f90.

| subroutine, public mrkiss_solvers_wt::adaptive_steps | ( | integer, intent(out) | status, |
| integer, dimension(istats_size), intent(out) | istats, | ||
| real(kind=rk), dimension(:,:), intent(out) | solution, | ||
| procedure(deq_iface) | deq, | ||
| real(kind=rk), intent(in) | t, | ||
| real(kind=rk), dimension(:), intent(in) | y, | ||
| real(kind=rk), dimension(:), intent(in) | param, | ||
| real(kind=rk), dimension(:,:), intent(in) | a, | ||
| real(kind=rk), dimension(:,:), intent(in) | b, | ||
| real(kind=rk), dimension(:), intent(in) | c, | ||
| integer, dimension(:), intent(in) | p, | ||
| real(kind=rk), intent(in), optional | t_max_o, | ||
| real(kind=rk), intent(in), optional | t_end_o, | ||
| real(kind=rk), intent(in), optional | t_delta_ini_o, | ||
| real(kind=rk), intent(in), optional | t_delta_min_o, | ||
| real(kind=rk), intent(in), optional | t_delta_max_o, | ||
| real(kind=rk), intent(in), optional | t_delta_fac_min_o, | ||
| real(kind=rk), intent(in), optional | t_delta_fac_max_o, | ||
| real(kind=rk), intent(in), optional | t_delta_fac_fdg_o, | ||
| real(kind=rk), dimension(:), intent(in), optional | error_tol_abs_o, | ||
| real(kind=rk), dimension(:), intent(in), optional | error_tol_rel_o, | ||
| integer, intent(in), optional | max_pts_o, | ||
| integer, intent(in), optional | max_bisect_o, | ||
| logical, intent(in), optional | no_bisect_error_o, | ||
| procedure(sdf_iface), optional | sdf_o, | ||
| real(kind=rk), intent(in), optional | sdf_tol_o, | ||
| procedure(stepp_iface), optional | stepp_o ) |
Take multiple adaptive steps with an embedded Runge-Kutta method using relatively traditional step size controls.
Method of controlling step size:
First we compute a combined tolerance vector:
\[ \mathbf{E} = [ A_i + R_i \max(\vert y_i\vert, \vert y_i+\Delta t\vert) ] \]
Now define a set containing the indexes of the non-zero elements of \(\mathbf{E}\):
\[ \mathbf{E_+} = \{i\vert\,E_i\ne0\} \]
When \(\vert E_+\vert=0\), i.e. when \(E_+=\emptyset\):
t_delta_fac_max_o Otherwise, we compute a composite error estimate:
\[ \epsilon = \sqrt{\frac{1}{\vert E_+\vert} \sum_{E_+}\left(\frac{\vert\Delta{y}_i-\Delta{y}_i\vert}{E_i}\right)^2} \]
From this we compute the ideal step size adjustment ratio:
\[ m = \left(\frac{1}{\epsilon}\right)^\frac{1}{1+\min(\p, \check{p})} \]
When \( \vert\Delta{y}_i-\Delta{y}_i\vert < E_i\,\,\,\,\forall i\), we:
Otherwise
Notes:
t_delta_fac_fdg_o t_delta_fac_max_o & t_delta_fac_min_o.t_delta_min_o & t_delta_max_o.| status | Exit status
| ||||||||||||||||||
| istats | Integer statistics for run
| ||||||||||||||||||
| solution | Array for solution. Each COLUMN is a solution:
| ||||||||||||||||||
| deq | The equation subroutine returning values for \(\mathbf{y}'\) – i.e. \(\mathbf{f}(t, \mathbf{y})\) | ||||||||||||||||||
| t | Initial condition for \(t\) – i.e. \(t_0\). | ||||||||||||||||||
| y | Initial condition for \(\mathbf{y}\) – i.e. \(\mathbf{y_0}\). | ||||||||||||||||||
| param | Data payload passed to deq | ||||||||||||||||||
| a | The butcher tableau \(\mathbf{a}\) matrix | ||||||||||||||||||
| b | The butcher tableau \(\mathbf{b}\) vector | ||||||||||||||||||
| c | The butcher tableau \(\mathbf{c}\) vector | ||||||||||||||||||
| p | Orders for the methods in the butcher tableau | ||||||||||||||||||
| t_max_o | Stop if \(t\) becomes greater than t_max_o. Different from t_end_o! Default: NONE | ||||||||||||||||||
| t_end_o | Try to stop integration with \(t\) equal to t_end. Default: NONE | ||||||||||||||||||
| t_delta_ini_o | Initial \(\Delta{t}\).
| ||||||||||||||||||
| t_delta_min_o | Minimum allowed \(\Delta{t}\). Default: mrkiss_config::t_delta_min_ai | ||||||||||||||||||
| t_delta_max_o | Maximum allowed \(\Delta{t}\). Default: NONE | ||||||||||||||||||
| t_delta_fac_min_o | Minimum \(\Delta{t}\) adaption factor for all but the first step. Default: mrkiss_config::t_delta_fac_min_ai | ||||||||||||||||||
| t_delta_fac_max_o | Maximum \(\Delta{t}\) adaption factor. Default: 2.0_rk | ||||||||||||||||||
| t_delta_fac_fdg_o | Extra \(\Delta{t}\) adaption factor when shrinking interval. Default: mrkiss_config::t_delta_fac_fdg_ai | ||||||||||||||||||
| error_tol_abs_o | Absolute error tolerance. Default: mrkiss_config::error_tol_abs_ai | ||||||||||||||||||
| error_tol_rel_o | Relative error tolerance. Default: mrkiss_config::error_tol_rel_ai | ||||||||||||||||||
| max_pts_o | Maximum number of points to put in solution. | ||||||||||||||||||
| max_bisect_o | Maximum number of bisection iterations to perform for each step. Default: mrkiss_config::max_bisect_ai | ||||||||||||||||||
| no_bisect_error_o | If .TRUE., then not exit on bisection errors | ||||||||||||||||||
| sdf_o | SDF function. Used to set new t_delta for a step. This subroutine may trigger one or more of the following actions:
| ||||||||||||||||||
| sdf_tol_o | How close we have to get to accept an sdf solution. Default: mrkiss_config::sdf_tol_ai | ||||||||||||||||||
| stepp_o | Step processing subroutine. Called after each step. |
Definition at line 1013 of file mrkiss_solvers_wt.f90.
| subroutine, public mrkiss_solvers_wt::fixed_t_steps_between | ( | integer, intent(out) | status, |
| integer, dimension(istats_size), intent(out) | istats, | ||
| real(kind=rk), dimension(:,:), intent(out) | solution, | ||
| procedure(deq_iface) | deq, | ||
| real(kind=rk), dimension(:), intent(in) | y, | ||
| real(kind=rk), dimension(:), intent(in) | param, | ||
| real(kind=rk), dimension(:,:), intent(in) | a, | ||
| real(kind=rk), dimension(:,:), intent(in) | b, | ||
| real(kind=rk), dimension(:), intent(in) | c, | ||
| integer, intent(in) | steps_per_pnt, | ||
| integer, dimension(:), intent(in), optional | p_o ) |
Take a solution with \(t\) values pre-populated, and take steps_per_pnt Runge-Kutta steps between each \(t\) value.
| status | Exit status
| ||||||||||
| istats | Integer statistics for run
| ||||||||||
| solution | Array for solution.
| ||||||||||
| deq | The equation subroutine returning values for \(\mathbf{y}'\) – i.e. \(\mathbf{f}(t, \mathbf{y})\) | ||||||||||
| y | Initial condition for \(\mathbf{y}\) – i.e. \(\mathbf{y_0}\). | ||||||||||
| param | Data payload passed to deq | ||||||||||
| a | The butcher tableau \(\mathbf{a}\) matrix | ||||||||||
| b | The butcher tableau \(\mathbf{{b}}\) vector | ||||||||||
| c | The butcher tableau \(\mathbf{c}\) vector | ||||||||||
| steps_per_pnt | Number of Runge-Kutta steps to reach each solution point | ||||||||||
| p_o | The order for the Runge-Kutta method in the butcher tableau to enable Richardson extrapolation |
Definition at line 1273 of file mrkiss_solvers_wt.f90.

| subroutine, public mrkiss_solvers_wt::interpolate_solution | ( | integer, intent(out) | status, |
| integer, dimension(istats_size), intent(out) | istats, | ||
| real(kind=rk), dimension(:,:), intent(inout) | solution, | ||
| real(kind=rk), dimension(:,:), intent(in) | src_solution, | ||
| procedure(deq_iface) | deq, | ||
| real(kind=rk), dimension(:), intent(in) | param, | ||
| integer, intent(in), optional | num_src_pts_o, | ||
| logical, intent(in), optional | linear_interp_o ) |
Create an interpolated solution from a source solution.
Take a series of \(t\) values and a source solution, and produces a new solution with points at the given \(t\) values.
In order to produce a new solution point at a given \(t\) value, we first find two solution points in the source solution that bracket \(t\). That is to say, we find two source solutions with times \(t_0\) and \(t_1\) such that
\[ t_0 \le t \le t_1 \]
If Hermite interpolation is being used (linear_interp_o==.FALSE.), we then compute the new \(\mathbf{\tilde{y}}\) value like so:
\[ \mathbf{\tilde{y}}(t) = \sum_{i=0}^3 \mathbf{c_i} \left(\frac{t - t_0}{\Delta{t}}\right)^i \]
Where \(\Delta{t}=t_1-t_0\) and the \(\mathbf{c_i}\) defined as:
\[ \begin{array}{lcl} \mathbf{c_3} & = & 2\cdot\mathbf{y}(t_0) + \Delta{t}\cdot\mathbf{y}'(t_0) - 2\cdot\mathbf{y}(t_1) + \Delta{t}\cdot\mathbf{y}'(t_1) \\ \mathbf{c_2} & = & -2\cdot\Delta{t}\mathbf{y}'(t_0) - 3\cdot\mathbf{y}(t_0) + 3\cdot\mathbf{y}(t_1) - \Delta{t}\cdot\mathbf{y}'(t_1) \\ \mathbf{c_1} & = & \Delta{t}\cdot\mathbf{y}'(t_0) \\ \mathbf{c_0} & = & \mathbf{y}(t_0) \end{array} \]
Note that
\[ \begin{array}{lcl} \mathbf{\tilde{y}}(t_0) & = & \mathbf{y}(t_0) \\ \mathbf{\tilde{y}}(t_1) & = & \mathbf{y}(t_1) \\ \mathbf{\tilde{y}}'(t_0) & = & \mathbf{y}'(t_0) \\ \mathbf{\tilde{y}}'(t_1) & = & \mathbf{y}'(t_1) \end{array} \]
And thus the collection of Hermite approximation polynomials produce a is \( \mathcal{C}^\infty\) approximation over the entire solution interval. Also note that the Hermite solution provides a solution of \(\mathcal{O}(3)\).
If linear interpolation is being used (linear_interp_o==.TRUE.), we then we compute the new \(\mathbf{\tilde{y}}\) value like so:
\[ \mathbf{\tilde{y}}(t) = \frac{\mathbf{y}(t_0) (t_1 - t) + \mathbf{y}(t_1) (t - t_0)}{\Delta{t}} \]
Where \(\Delta{t}=t_1-t_0\).
While the collection of linear approximation functions provide the same equality at source solution \(t\) values that we had with Hermite interpolation, that equality doesn't extend to the values of the derivatives. So while this collection of linear interpolation functions provide a continuous approximation over the integration interval, this approximation is not generally smooth.
Regardless of the interpolation method, the new values for \(\mathbf{\tilde{y}}'(t)\) are directly computed as
\[ \mathbf{f}(t, \mathbf{\tilde{y}}) \]
using the deq and param arguments.
| status | Exit status
| ||||||||||
| istats | Integer statistics for run
| ||||||||||
| solution | Array for new solution.
| ||||||||||
| src_solution | Array for source solution.
| ||||||||||
| deq | The equation subroutine returning values for \(\mathbf{y}'\) – i.e. \(\mathbf{f}(t, \mathbf{y})\) | ||||||||||
| param | Data payload passed to deq | ||||||||||
| num_src_pts_o | The number of solutions in src_solution. Default inferred from size of src_solution. | ||||||||||
| linear_interp_o | If .TRUE. do linear interpolation, and Hermite otherwise. Default: .FALSE. |
Definition at line 1375 of file mrkiss_solvers_wt.f90.